
Zhixian Xie
I am a PhD student at Intelligent Robotics and Interactive Systems (IRIS) Lab at Arizona State University, Tempe AZ, USA.
In 2022, I received my B.Eng degree in automation at Shanghai Jiao Tong University, Shanghai, China. I joined IRIS lab for PhD study in 2024.1, working with Dr. Wanxin Jin.
My Research
My research focuses on:
-
Dexterous Manipulation integrating model-free learning with physics-based simulation, optimization, and control for solving contact-rich dexterous manipulation efficiently and reliably.
-
Robot Learning from Human design structured learning methods to enable robots learn skills from human interactions, with safety, robustness, and data efficiency.
Career
- 2026/04: I will start an intership on manipulation intelligence at Honda Researh Institute from 2026/05 to 2026/08.
Publication & Preprints
ComFree-Sim: A GPU-Parallelized Analytical Contact Physics Engine for Scalable Contact-Rich Robotics Simulation and Control
Chetan Borse, Zhixian Xie (co-first author), Wei-Cheng Huang, Wanxin Jin
Submitted to IROS 2026
[Paper]/
[Code]/
[Video]/
[Webpage]

Where to Touch, How to Contact: Hierarchical RL–MPC Framework for Geometry-Aware Long-Horizon Dexterous Manipulation
Zhixian Xie, Yu Xiang, Michael Posa, Wanxin Jin
Submitted to RSS 2026
[Paper]/
[Webpage]

Safe MPC Alignment with Human Directional Feedback
Zhixian Xie, Wenlong Zhang, Yi Ren, Zhaoran Wang, George. J. Pappas, Wanxin Jin
IEEE Transactions on Robotics (T-RO)
[Paper]/
[Code]/
[Video]/
[Webpage]

Robust Reward Alignment via Hypothesis Space Batch Cutting
Zhixian Xie, Haode Zhang, Yizhe Feng, Wanxin Jin
ICML 2025
[Paper]/
[Code]/
[Video]/
[Webpage]
On-Palm Dexterity: Dynamic Reorientation of Objects via Emergent Flipping and Sliding
Zhixian Xie, Wen Yang, Wanxin Jin
ICRA 2025 Workshop on Learning Meets Model-Based Methods for Contact-Rich Manipulation
[Paper]/
[Webpage]
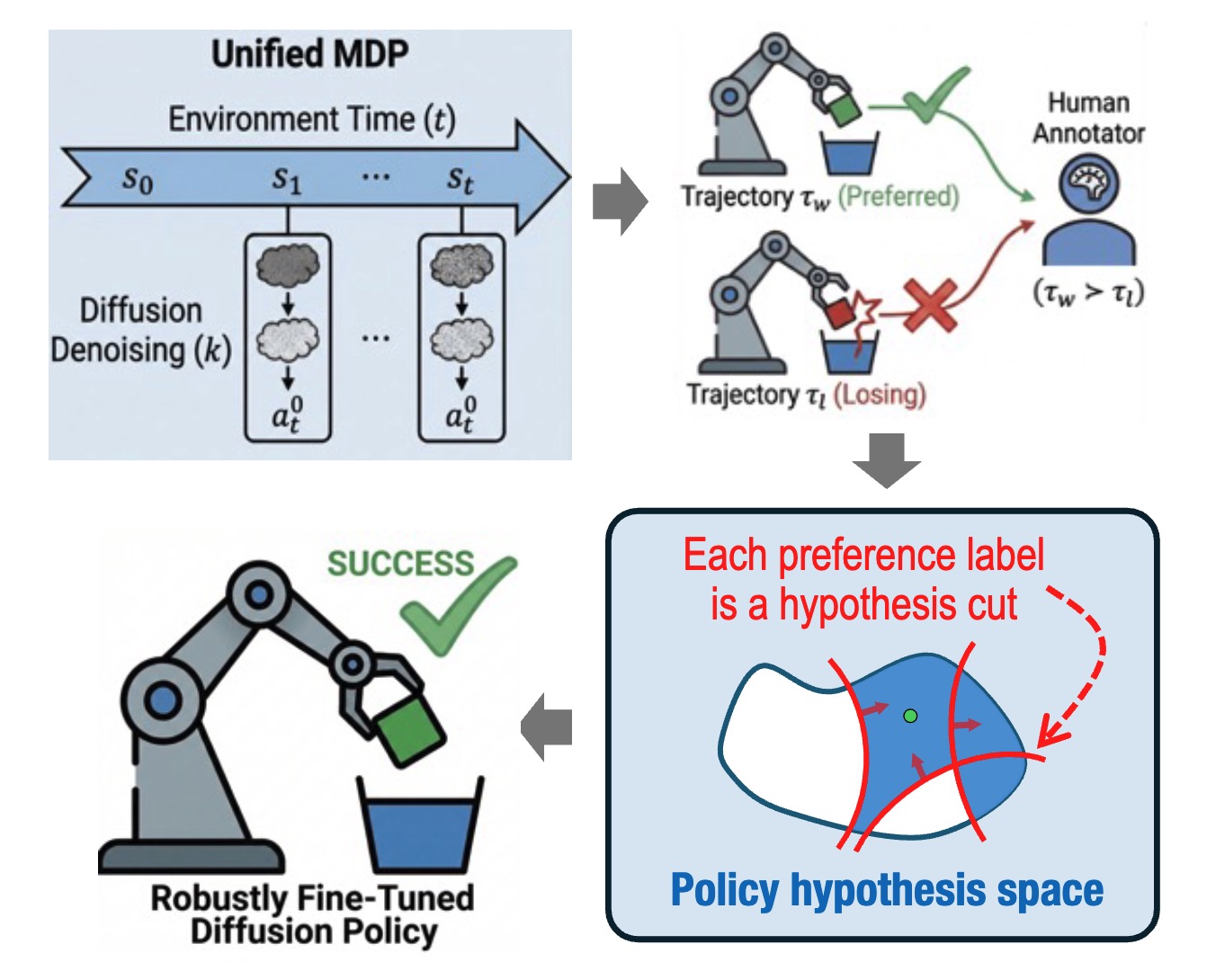
RoDiF: Robust Direct Fine-Tuning of Diffusion Policies with Corrupted Human Feedback
Amitesh Vatsa, Zhixian Xie, Wanxin Jin
Arxiv Preprint
[Paper]
TwinTrack: Bridging Vision and Contact Physics for Real-Time Tracking of Unknown Dynamic Objects
Wen Yang, Zhixian Xie, Yiting Wang, Abhijit Tadepalli, Heni Ben Amor, Shan Lin, Wanxin Jin
ICRA 2026
[Paper]/
[Webpage]/
[Video]
Language-Model-Assisted Bi-Level Programming for Reward Learning from Internet Videos
Harsh Mahesheka, Zhixian Xie, Zhaoran Wang, Wanxin Jin
Arxiv Preprint
[Paper]/
[Video]/
[Webpage]